Encoders Incrementales
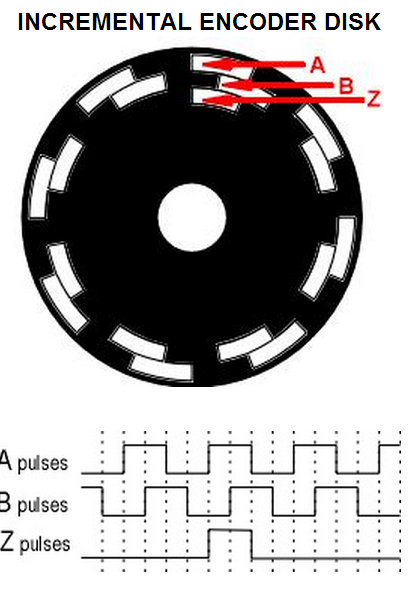
Los codificadores ópticos o encoders incrementales se
utilizan fundamentalmente para el cálculo de la posición angular. Básicamente
constan de un disco transparente, el cual tiene una serie de marcas opacas
colocadas radialmente y equidistantes entre si; de un
elemento emisor de luz ( como un diodo LED); y de un
elemento fotosensible que actua como receptor. El eje
cuya posición angular se va a medir va acoplado al disco. (
Ver figura )

El funcionamiento es el siguiente: cuando el sistema comienza a funcionar el
emisor de luz empieza a emitir; a medida que el eje vaya girando, se producirán
una serie de pulsos de luz en el receptor, correspondientes a la luz que atarviesa los huecos entre las marcas. Llevando una cuenta
de esos pulsos es posible conocer la posición del eje.
Sobre este esquema básico es habitual encontar algunas mejoras. Por ejemplo, se suele introducir otra franja de marcas por debajo,
desplazada de la anterior, para poder controlar el sentido del giro; además
suele ser necesario el empleo de una marca de referencia que nos ayudará a
saber si hemos completado una vuelta.
Realmente los encoders incrementales miden la
velocidad de giro, pero podemos extrapolar la posición angular. Como es lógico,
la resolución de este tipo de sensores depende directamente del número de
marcas que podamos poner físicamente en el disco.
La señal de salida se transmite por un hilo en el que se transmite un pulso por cada ángulo girado, de tal forma que si tenemos un encoder de 1000 ppr, tendremos un pulso por cada 360º/1000= 0,360º. El inconveniente es que no disponemos de una referencia absoluta de la posición en la que se encuentra el eje.
Las características básicas de un encoder incremental óptico son:
- Tensión de alimentación: Nos indica a que tensión puede trabajar el encoder. A veces es fija ( 5v, 12v, etc...), pero lo habitual es que sea un rango de tensiones.
- Resolución: Es el número de pulsos que da por revolución (ppr).
- Tipo de salida: Las salidas de los canales pueden ser de varios tipos; TTL, colector abierto, tótem-pole, etc..., por lo que habrá que utilizar el circuito adecuado para adaptar estas salidas.
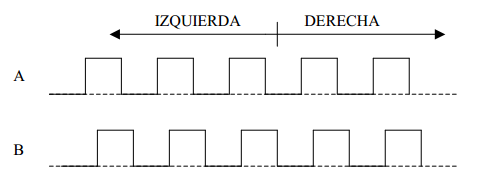
- Número de canales: Suelen ser 1 o 2, más un canal adicional de index (I) que de un pulso por vuelta. Con los encoders de un solo canal podemos saber el ángulo girado pero no la dirección de giro, por lo que la mayoría de los encoders llevan dos canales que generan señales cuadradas desplazadas 90º. Este desfase, como veremos más adelante, es el que nos permite determinar la dirección de giro.
Supongamos un encoder de 500 ppr. Las señales a lo largo del tiempo que vamos a obtener por los canales A y B serán las siguientes:
En cada revolución completa del encoder podremos contar 500 pulsos, con un
flanco de subida ( transición de 0 a 1 ) y un flanco de bajada ( transición de 1 a 0 ) cada
uno. Para determinar el ángulo girado por el encoder se cuenta el número de flancos de
subida ( o de bajada ) generados en un canal ( por ejemplo el A ) y la dirección vendrá
determinada, en cada pulso, por el estado del otro canal, de tal forma que si esta a 0
determinamos que va en una dirección ( la que nosotros queramos ) y si es 1 ira en la
dirección contraria.
Podemos leer los flancos de subida del canal A y B para duplicar la resolución por 2, o leer los 2 flancos de subida y los 2 de bajada para multiplicamos la resolución por 4, con lo que un encoder de 500 ppr se convierte en uno de 2000 ppr.
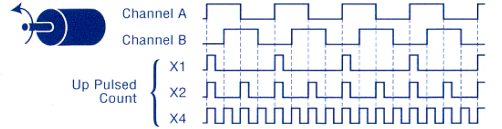
Por ejemplo, vamos a realizar la lectura de un encoder con dos canales
desplazados 90º, con resolución máxima, es decir, leyendo los cuatro flancos. Para
entender bien el funcionamiento hemos de pensar que cuando cambiamos de dirección,
lo que antes era el flanco de subida, pasa a ser flanco de bajada y viceversa. Pasemos al
ejemplo:
- Si tenemos flanco subida en A
- Si B=0 Desplazamos un paso a la DERECHA
- Si B=1 Desplazamos un paso a la IZQUIERDA
- Si tenemos flanco bajada en A
- Si B=1 Desplazamos un paso a la DERECHA
- Si B=0 Desplazamos un paso a la IZQUIERDA
- Si tenemos flanco subida en B
- Si A=1 Desplazamos un paso a la DERECHA
- Si A=0 Desplazamos un paso a la IZQUIERDA
- Si tenemos flanco bajada en B
- Si A=0 Desplazamos un paso a la DERECHA
- Si A=1 Desplazamos un paso a la IZQUIERDA
Tipos de salida y conexiones de los encoder al PLC
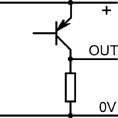
- NPN con resistencia PULLING
- En este caso el común de la entrada podrá ir conectado a Vcc y a GND
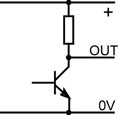
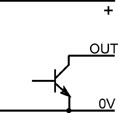
- NPN de colector abierto
- En este caso el común de la entrada tendrá que ir conectado a Vcc
- PNP con resistencia PULLING
- En este caso el común de la entrada podrá ir conectado a Vcc y a GND
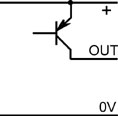
- PNP Colector abierto
- En este caso el común de la entrada tendrá que ir conectado a GND
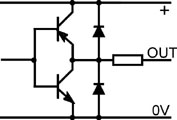
- PUSH PULL
- En este caso el común de la entrada podrá ir conectado a Vcc y a GND
Ejemplo hoja de características