Donde;
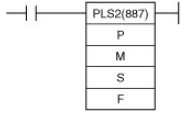
- P para especificar el puerto (recuerden puerto 0 para las salidas 100.0 y 100.1 y puerto 1 para las salidas 100.2 y 100.3)
- M para el modo se salida:
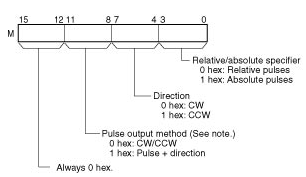
- Los primeros 4 bits para decir si son pulsos relativos a la posición actual o absolutos, referenciados al origen.
- Del bit 4 al 7 se utiliza en el caso de ser movimiento relativo a la posición en la que se está, habrá que indicar si los pulsos son a derechas o a izquierdas, en el caso de elegir movimiento absoluto no se hara caso a este punto.
- Del bit 8 al 11 se indica si los pulsos son:
-
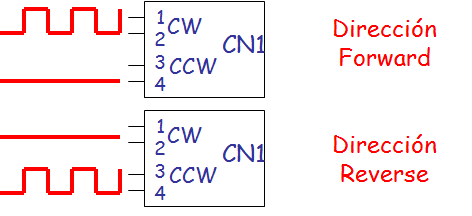
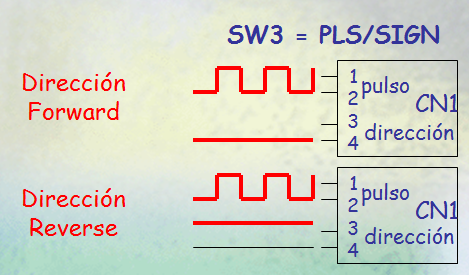
CW/CCW Pulso + Dirección
- Del bit 12 al 15 siempre estaran a 0.
- Ejemplo: Para que sea movimientos absolutos con pulso + dirección M = #0101
- Ejemplo: Para que sean movimientos relativos con giro a derechas y CW/CCW entonces M = #0000
- S primer canal de la tabla de configuración, para configurar todos los parámetros del desplazamiento se a de realizar se utilizará una tabla, esta estará formada por 6 canales consecutivos, y en S se pondrá la dirección del primer canal de todos.
| Dirección DM |
Descripción |
| D100 |
Ratio de acceleración del movimiento, en pulsos por segundo cada 4 milisegundos.
Por ejemplo si ponemos 500 pps significará que el servo motor acelerará
a razón de 500 pulsos por segundo cada 4 ms, los primeros 4 ms el servo
girará a 500 pulsos por segundo, de los 5 ms a los 8ms a 1000 pulsos
por segundo, de los 9 ms a los 12 ms girará a 1500 pps, i así
sucesivamente hasta alcanzar la frecuencia objetivo. |
| D101 |
Idem que el anterior pero para la desaceleración. |
| D102 y D103 |
Frecuencia objetivo,
frecuencia a la que realizará el trabajo, si hemos configurado el servo
motor en 1000 pulsos por vuelta y la frecuencia objetivo es de 1000
pulsos por segundo (#03E8) el servomotor girará a 1 vuelta por segundo, si la frecuencia objetivo es de 2000pps (#07D0) el servomotor girará a 2 vueltas por segundo. |
| D104 y D105 |
Cantidad de pulsos a
realizar en moviemiento absoluto o relativo. Si se configura el servo
motor en 1000 pulsos por vuelta, y en estos dos canales se indica que
se desea desplazar el servomotor 10000 pulsos (#2710) este girará 10 vueltas completas. |