Antes de empezar a mover el servomotor a las diferentes posiciones a las que
deseamos ir tenemos que buscar el origen, punto a partir del cual se
referenciaran todos los puntos.
Cada eje dispone de 3 sensores de proximidad para indicar los límites en el
avance y retroceso y para definir el origen del eje. Es necesario definir el
origen de los ejes para tener un punto de referencia (0,0) a partir del cual
poder realizar movimientos absolutos en el plano XY.
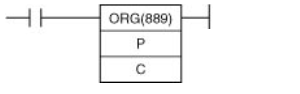
La instrucción para
iniciar la búsqueda es la ORG.
Donde:
P es el puerto a
utilizar, si recordamos que el PLC que vamos a utilizar es el CP1L de 14
puntos, este PLC dispone de dos puertos (el puerto 0 con las salidas 100.0 y
100.1 y el puerto 1 con las salidas 100.2 y 100.3) de salidas rápidas. (Cada
puerto utiliza dos salidas).
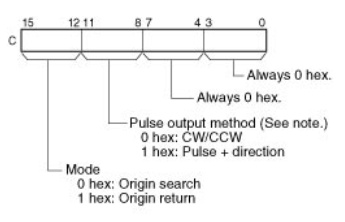
C es el dato de control
Los primeros 8 bits estarán
a cero.
Del bit 8 al 11 dependerá
del método de pulsos utilizado, nuestro PLC soporta dos métodos de pulsos "#XX00".
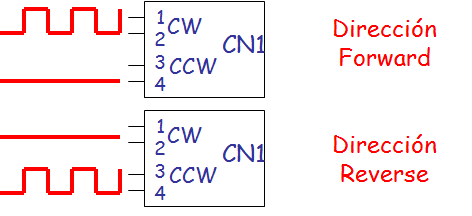
CW / CCW si ponemos un 1
en estos 4 bits se utilizará este método, se enviaran pulsos por la primera
salida para girar a derechas y se enviaran pulsos por la segunda salida para
girar a izquierdas.
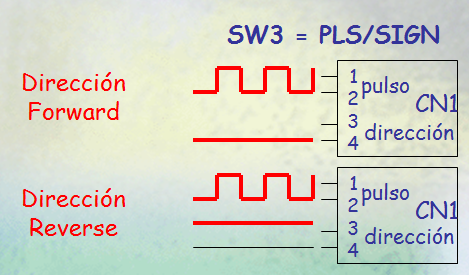
Pulso + Dirección: si
ponemos un 0 en estos cuatro bits se utilizará este método, se enviaran pulsos
siempre por la primera salida de pulsos, y si la segunda salida está a 0 girará
a derechas y si está a 1 girará a izquierdas.
Del bit 12 al 15 se
configura si se va a buscar el origen con un 0 y si se desea volver al
origen una vez encontrado este se pondrá un 1. (La vuelta al origen no
funciona, al menos con el PLC que se va a utilizar en clase se
utilizará para ello la PLS2 para ir al punto 0).
Como ejemplo, si queremos realizar la búsqueda del origen con el método CW/CCW el dato de control será #0100,
si se desea realizar la búsqueda del origen con el método Pulso +
Dirección el dato de control será #0000. Para la vuelta al origen con
el método CW/CCW el dato de control será #1100 (recordar aunque ya se
ha indicado que este método no nos funciona con los PLC de clase).