La primera pestaña que aparece es la siguente:
Se va a la
pestaña "Pulse Ouput 0" o Salida de pulsos 0 para configurar los
parámetros de la búsqueda de origen del puerto de salida de pulsos 0.
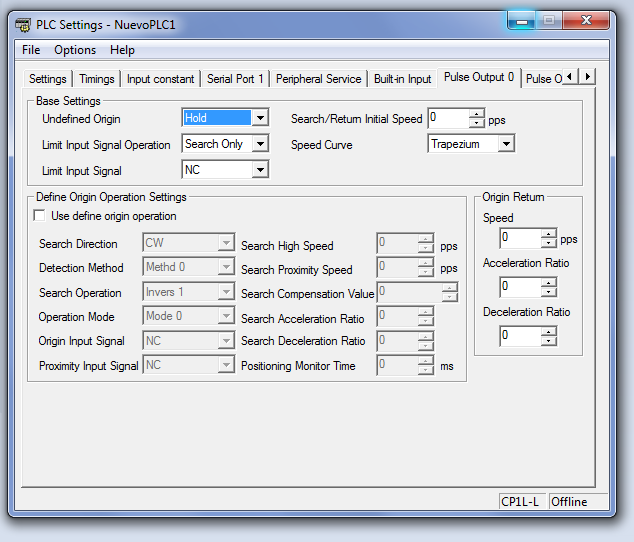
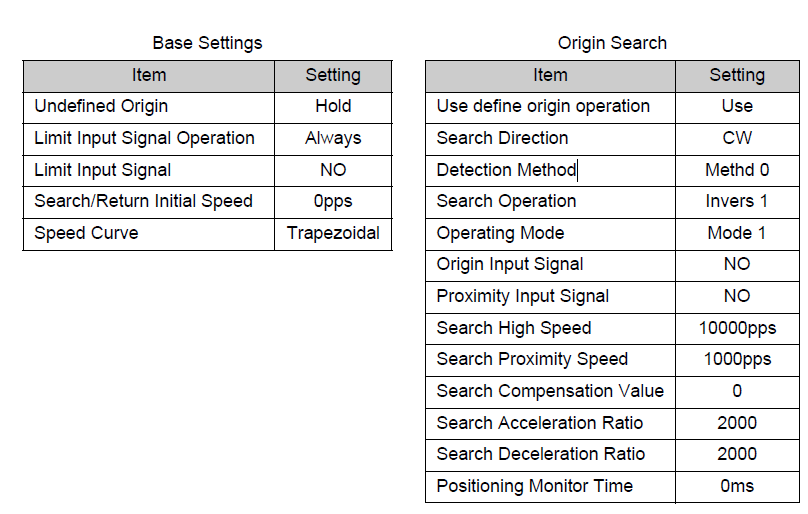
Parámetros de
configuración básicos
- Origen indefinido:
- Operación de los sensores de límite: Se indica si
funcionan siempre o solamente para la búsqueda del origen.
- Señal de los límites: Se indica si los sensores
externos instalados son normalmente abiertos o normalmente cerrados.
- Velocidad inicial para la búsqueda o retorno: Si
deseamos empezar a acelerar a una velocidad diferente a 0pps (pulsos por
segundo o Hercios).
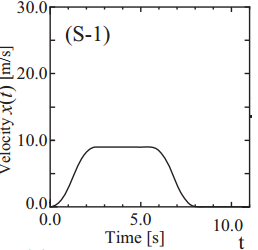
- Curva de velocidad:
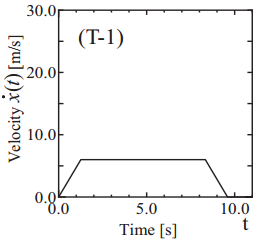
Trapezoide
S-Shape
Los
parámetros de configuración de la búsqueda de origen serán accesibles cuando se
active la opción “Use Define Origin Operation”
- Dirección de Búsqueda: Se indica si el inicio de la
búsqueda se realiza a derechas o a izquierdas. (CW o CCW)
- Método de Detección:
- Método 0: utiliza un sensor externo,
el sensor de proximidad de origen. OFF - ON - OFF.
- Método 1: utiliza la señal de fase Z
del encoder del Servo para la búsqueda del origen. No utiliza la señal de
posicionamiento finalizado.
- Método 2: utiliza la señal de fase Z
del encoder del Servo para la búsqueda del origen. Utiliza la señal de
posicionamiento finalizado.
- Operación de búsqueda:
- Inverso 1: Se buscará el origen en la
dirección de búsqueda seleccionado. En caso de activarse uno de los sensores de
límite, se cambiará el sentido de giro del servo.
- Inverso 2: Se buscará el origen en la
dirección de búsqueda seleccionado. Detiene el giro del servo si se activa uno
de los dos sensores de límite.
- Modo de operación:
- Modo 0: Utiliza una señal externa al servomotor
como señal de origen.
- Modo 1: Utiliza la señal de fase Z del encoder del
servomotor, no se utilizará la señal de posicionamiento finalizado.
- Modo 2: Utiliza la señal de fase Z del encoder del
servomotor, además se utilizará la señal de posicionamiento finalizado.
- Señal de la entrada de origen: la señal de la fase z
que el servo drive recoge del servo motor y envía al PLC ¿es normalmente
abierta o normalmente cerrada?.
- Señal de proximidad de origen: La señal de proximidad
de origen, que viene de un sensor externo, ¿es normalmente abierta o
normalmente cerrada?
- Velocidad alta de búsqueda: Desde que se inicia la
búsqueda del origen hasta que se activa el sensor de proximidad de origen el
servomotor irá a esta velocidad.
- Velocidad de búsqueda proximidad de origen: La búsqueda
de origen se inicia a velocidad alta, una vez activado el sensor de proximidad
de origen indicando que el origen está cerca se terminará la búsqueda con esta
velocidad. (Es importante que esta sea menor que la Velocidad alta de búsqueda)
- Compensación del valor de búsqueda: Se dejará siempre
a cero.
- Ratio de la aceleración: Este ajuste determina la
relación de aceleración (de velocidad inicial y de alta velocidad) y la
relación de desaceleración (de alta velocidad y Proximidad velocidad) cuando de
búsqueda de origen se ejecuta. Por ejemplo si ponemos un 100 quiere decir que
la frecuencia aumentará en 100 pulsos cada 4 milisegundos. Es decir, hasta los
4 ms irá a 100pps (pulsos por segundo), hasta los 8 ms irá a 200pps,… así hasta
alcanzar la velocidad alta de búsqueda.
- Ratio de la desaceleración: Idem anterior pero para desacelerar.